






BOSM - vaakasuuntainen vastapora- ja porauskone
1. Laitteiden käyttö:
BOSM-vaakasuora vastapora- ja porakone on erityinen kone yrityksellesi torninostureiden kansien käsittelyyn. Kone on varustettu kahdella vaakaporaus- ja porauspäällä, joilla voidaan porata, jyrsintää ja porata työkappaleita tehokkaalla iskualueella. Leikkaus ja muu käsittely, laitteiden paikannusnopeus on nopea, käsittelyn tarkkuus on korkea ja käsittelyteho on korkea.
2. Laitteen rakenteen ominaisuudet:
2. 1. PääkomponentitKone
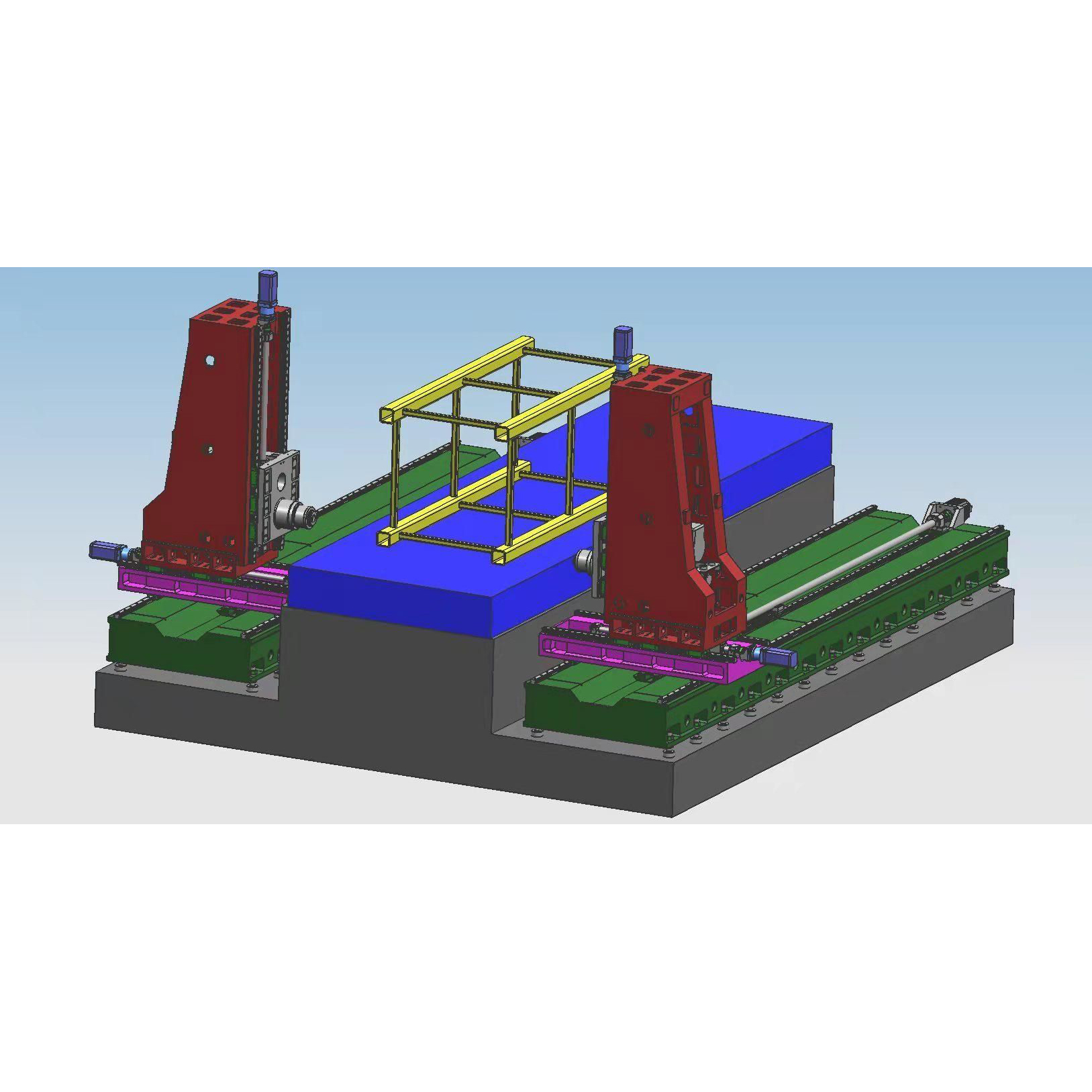
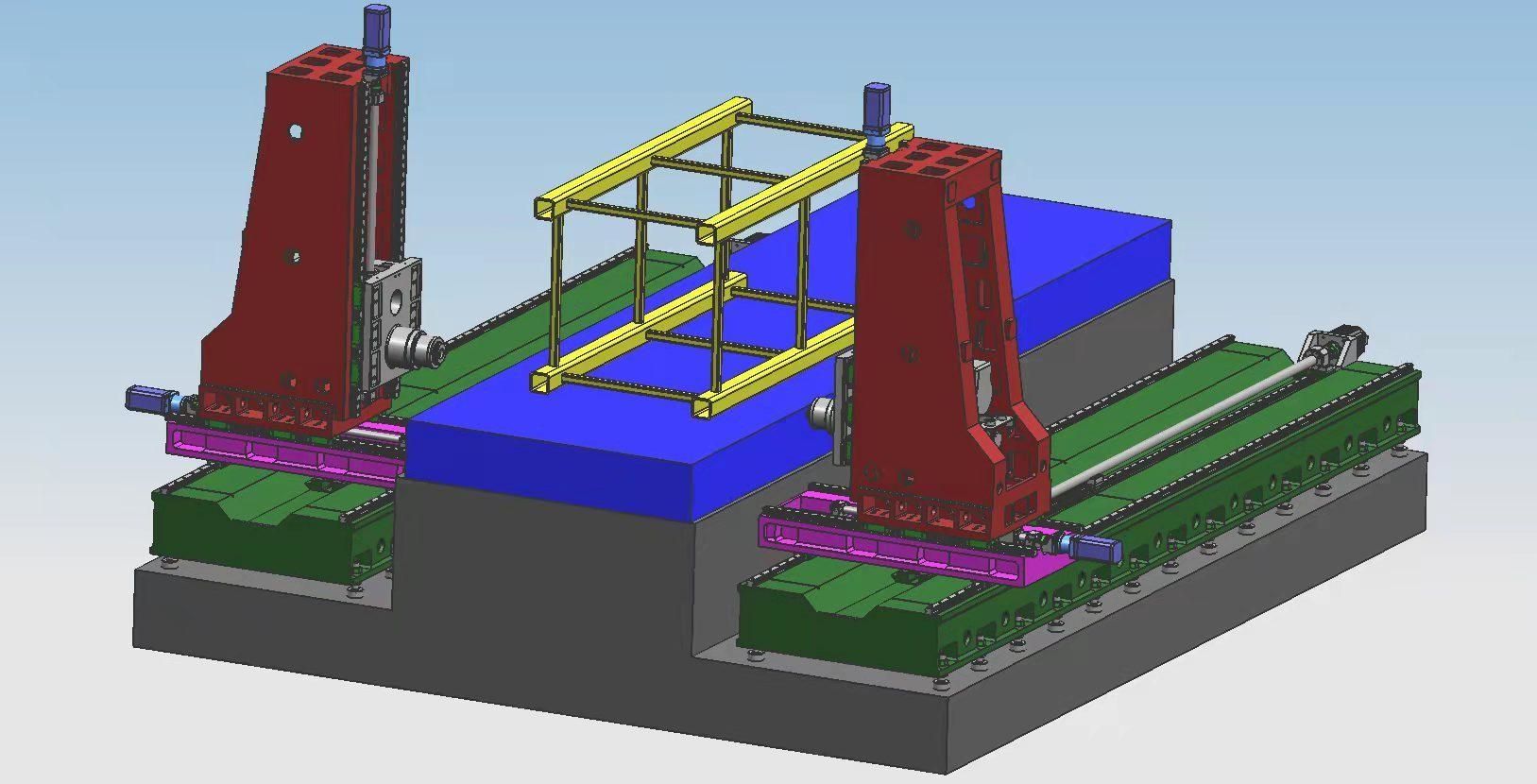
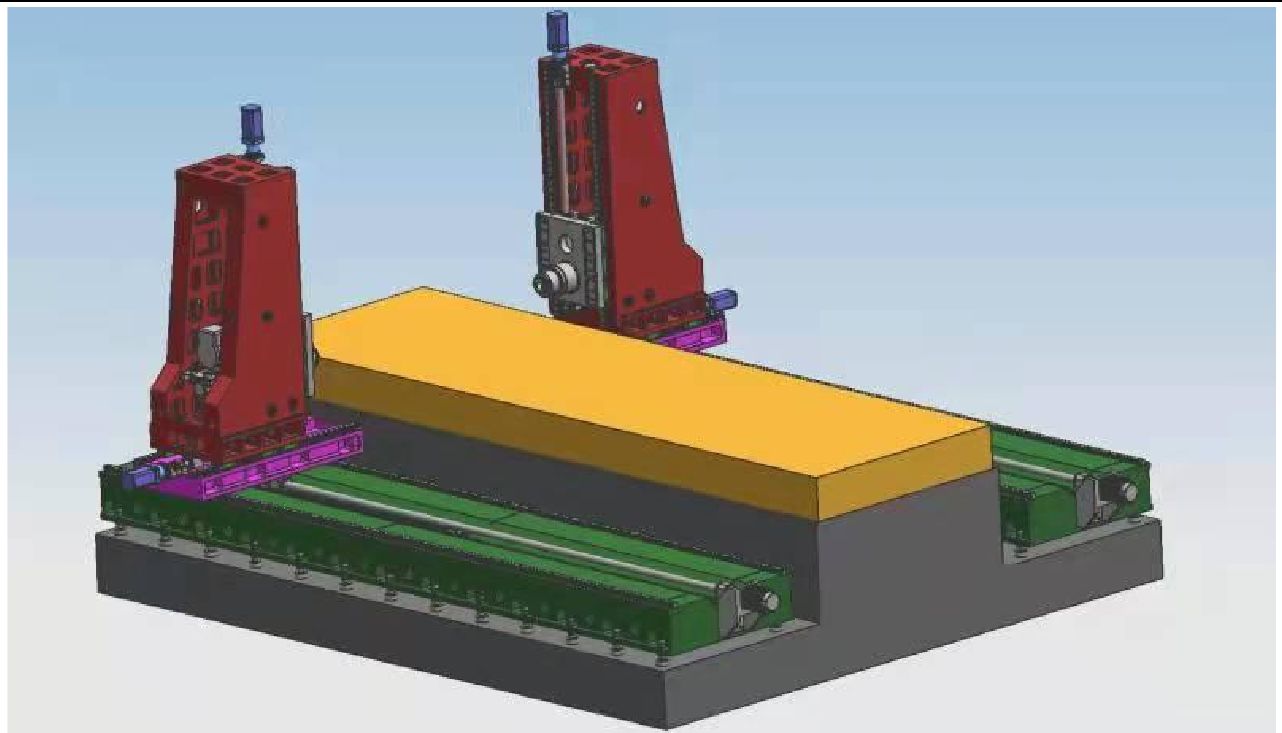
Koneen pääkomponentit: sänky, työpöytä, vasen ja oikea pylväs, satulat, männät jne., suuret osat on valmistettu hartsihiekkavalusta, korkealaatuinen harmaarauta 250 valu, hehkutettu kuumahiekkakuoppaan → tärinävanheneminen → kuuma uunihehkutus → värähtelyvanhentaminen → karkea koneistus → tärinävanhentaminen → uunihehkutus → värähtelyvanhentaminen → viimeistely osien negatiivisen jännityksen poistamiseksi kokonaan ja osien suorituskyvyn pitämiseksi vakaana. Laitteen työpöytä on kiinteä, ja molemmilla puolilla olevat tehopäät voivat liikkua alustan etu- ja takasuunnassa; Koneessa on toimintoja, kuten poraus, poraus, upotus, kierteitys jne. Työkalun jäähdytysmenetelmä on sisäinen jäähdytys ja ulkoinen jäähdytys. Kone sisältää 5 syöttöakselia, 2 leikkuuvoimapäätä, jotka voidaan synkronoida 5 akselin kanssa samanaikaisesti tai ne voivat olla yksitoimisia. Koneen ja tehopään aksiaalinen suunta on esitetty alla olevassa kuvassa.
2. 2 Aksiaalivaihteiston syöttöosan päärakenne
2.2.1 X-akseli: Tehopää liikkuu edestakaisin pohjan ohjauskiskoa pitkin.
X1-akselin käyttö: AC-servomoottoria ja erittäin tarkkaa planeettavähennystä käytetään voimapään ohjaamiseen kuularuuvikäytön läpi X-akselin lineaarisen liikkeen toteuttamiseksi.
X2-akselinen voimansiirto: AC-servomoottoria ja erittäin tarkkaa planeettavähennystä käytetään voimapään ohjaamiseen palloruuvin kautta X-akselin lineaarisen liikkeen toteuttamiseksi.
Ohjainkiskomuoto: Kaksi erittäin lujaa, tarkkaa, lineaarista ohjauskiskoa on laatoitettu levennetylle alustalle.
2.2 Y1-akseli: Tehopää liikkuu edestakaisin ylös ja alas kolonnilla.
Y1-akselin käyttö: Käytä AC-servomoottoria ajamaan palloruuvin läpi Y1-akselin lineaarisen liikkeen toteuttamiseksi. Ohjainkiskomuoto: 4 kpl 45-tyypin lineaarijohteita.
2.2.3 Y2-akseli: Tehopää liikkuu edestakaisin ylös ja alas kolonnilla.
Y2-akselin voimansiirto: AC-servomoottoria käytetään kuularuuvin läpi ajamiseen Y1-akselin lineaarisen liikkeen toteuttamiseksi.
Ohjainkiskomuoto: 4 kpl 45-tyypin lineaarijohteita.
2.2.4 Z1-akseli: Tehopää liikkuu edestakaisin satulassa.
Z1-akselin voimansiirto: AC-servomoottoria ja erittäin tarkkaa planeettavähennystä käytetään liikkeen ohjaamiseen palloruuvin läpi Z1-akselin lineaarisen liikkeen toteuttamiseksi.
2.2.5 Z2-akseli: Tehopää liikkuu edestakaisin satulassa.
Z2-akselin voimansiirto: AC-servomoottoria ja erittäin tarkkaa planeettavähennystä käytetään liikkeen ohjaamiseen palloruuvin läpi Z2-akselin lineaarisen liikkeen toteuttamiseksi.
2.3. Lastujen poisto ja jäähdytys
Työpöydän alle on asennettu molemmille puolille litteät ketjulastukuljettimet, ja rautalastut voidaan purkaa lopussa lastukuljettimeen sivistyneen tuotannon toteuttamiseksi. Lastukuljettimen jäähdytysnestesäiliössä on jäähdytyspumppu, jota voidaan käyttää työkalun sisäiseen jäähdytykseen + ulkoiseen jäähdytykseen työkalun suorituskyvyn ja käyttöiän varmistamiseksi, ja jäähdytysneste voidaan kierrättää.
3. Täysin digitaalinen numeerinen ohjausjärjestelmä:
3.1. Lastunmurtotoiminnolla voidaan asettaa lastun katkeamisaika ja lastunmurtojakso ihmisen ja koneen välisellä rajapinnalla.
3.2. Työkalun nostotoiminnolla työkalun nostoetäisyys voidaan asettaa ihmisen ja koneen käyttöliittymässä. Kun etäisyys saavutetaan, työkalu nostetaan nopeasti, ja sitten lastut heitetään pois, ja sitten pikakelataan eteenpäin porauspinnalle ja muunnetaan automaattisesti töihin.
3.2. Keskitetty ohjausyksikkö ja kämmenlaite käyttävät numeerista ohjausjärjestelmää, ja niissä on USB-liitäntä ja LCD-nestekidenäyttö. Ohjelmoinnin, tallennuksen, näytön ja viestinnän helpottamiseksi käyttöliittymässä on toimintoja, kuten ihmisen ja koneen välinen dialogi, virheen kompensointi ja automaattinen hälytys.
3.2.. Laitteen tehtävänä on esikatsella ja tarkistaa reiän sijainti ennen käsittelyä, ja toiminta on erittäin kätevää.
4. Automaattinen voitelu
Koneen tarkat lineaariset ohjauskiskoparit, tarkkuuspalloruuviparit ja muut erittäin tarkat liikeparit on varustettu automaattisilla voitelujärjestelmillä. Automaattinen voitelupumppu tuottaa paineöljyä, ja kvantitatiivinen voitelulaitteen öljykammio tulee öljyyn. Kun öljykammio on täytetty öljyllä ja järjestelmän paine nousee arvoon 1,4–1,75 Mpa, järjestelmän painekytkin sulkeutuu, pumppu pysähtyy ja tyhjennysventtiili puretaan samanaikaisesti. Kun öljynpaine tiellä laskee alle 0,2 Mpa:n, kvantitatiivinen voitelulaite alkaa täyttää voitelukohtaa ja suorittaa yhden öljytäytön. Kvantitatiivisen öljyäjän syöttämän tarkan öljymäärän ja järjestelmän paineen havaitsemiskyvyn ansiosta öljynsyöttö on luotettavaa ja varmistaa, että jokaisen kinemaattisen parin pinnalla on öljykalvo, joka vähentää kitkaa ja kulumista ja estää vaurioita. ylikuumenemisen aiheuttamaan sisäiseen rakenteeseen. , varmistaaksesi Koneen tarkkuuden ja käyttöiän.
5. Konekäyttöympäristö:
Virtalähde: Kolmivaiheinen AC380V±10%, 50Hz±1 Ympäristön lämpötila: -10°~ 45°
6. Hyväksymiskriteerit:
JB/T10051-1999 "Metallinleikkauskoneiden hydraulijärjestelmän yleiset tekniset tiedot"
7. Tekniset parametrit:
| Malli | 2050-5Z | |
| Suurin työstettävän työkappaleen koko | Pituus × leveys × korkeus (mm) | 5000×2000×1500 |
| työpöydän koko | Pituus X Leveys (mm) | 5000*2000 |
| Voimapään pohjan suuntaajo | Liikkuminen edestakaisin (mm) | 5000 |
| Tehoa pää ylös ja alas | Männän liike ylös ja alas (mm) | 1500 |
|
Vaakasuuntainen mäntätyyppinen porauspää Tehopää 1 2 | Määrä (2 kpl) | 2 |
| Karan kartio | BT50 | |
| Poran halkaisija (mm) | Φ2-Φ60 | |
| Kierteityshalkaisija (mm) | M3-M30 | |
| Karan nopeus (r/min) | 30-3000 | |
| Servokaran moottorin teho (kw) | 22*2 | |
| Vasen ja oikea liike (mm) | 600 | |
| Kaksisuuntainen paikannustarkkuus | 300mm * 300mm | ±0,025 |
| Kaksisuuntainen toistuva paikannustarkkuus | 300mm * 300mm | ±0,02 |





