BOSM -6025 vastapäinen porausjyrsinkone
1. Laitteetkäyttää:
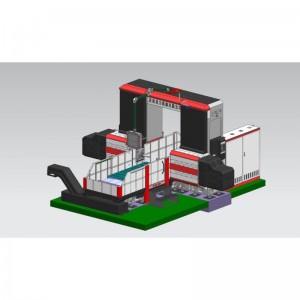
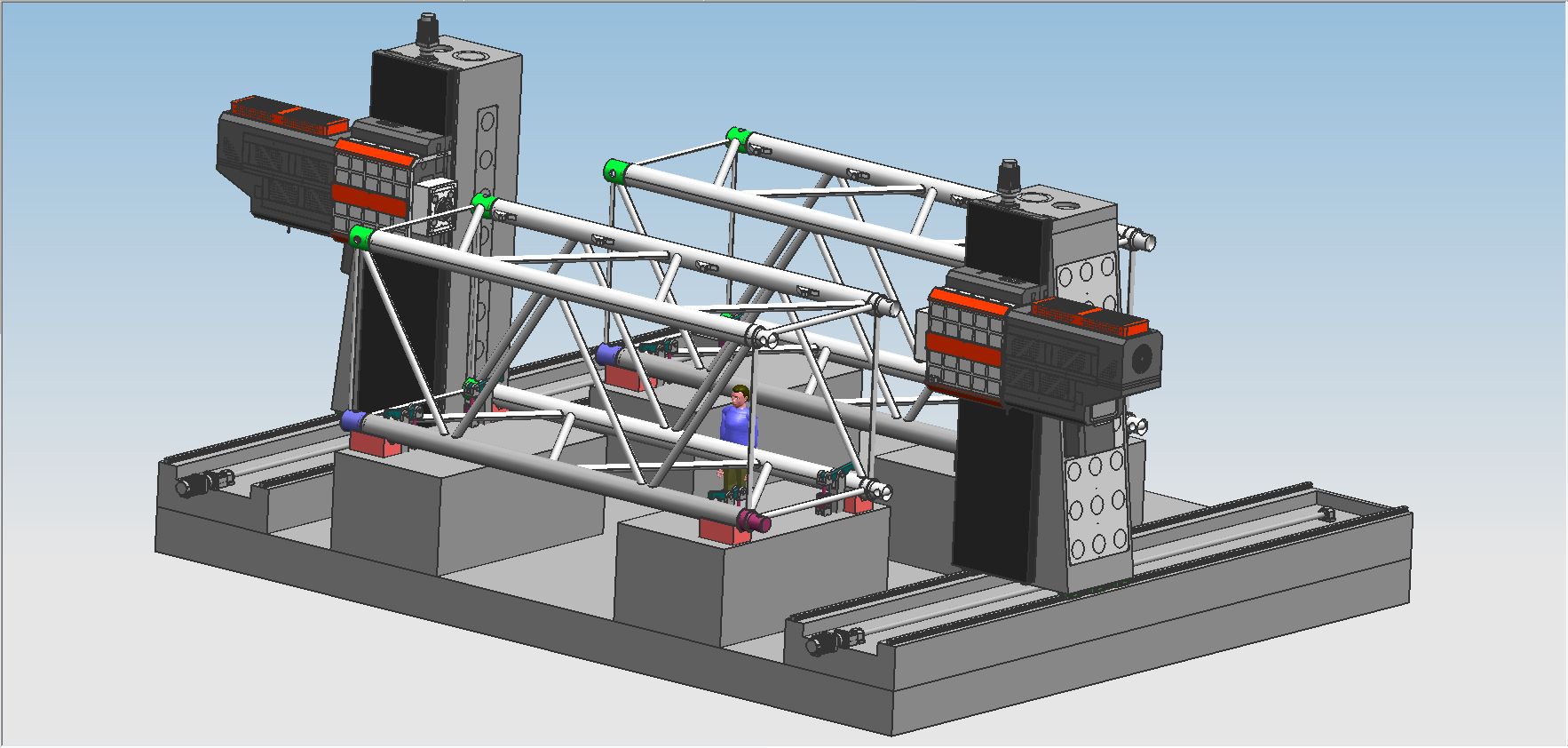
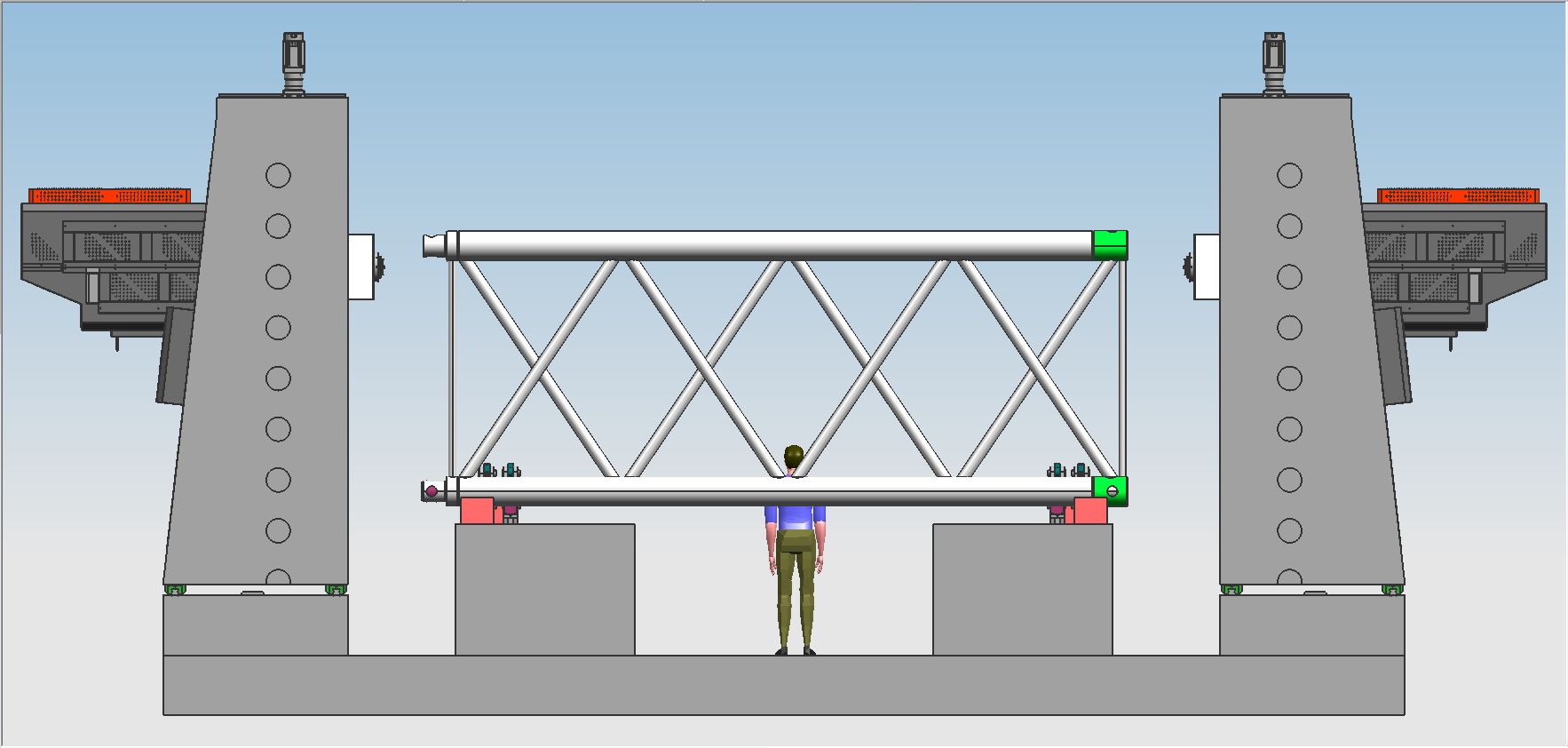
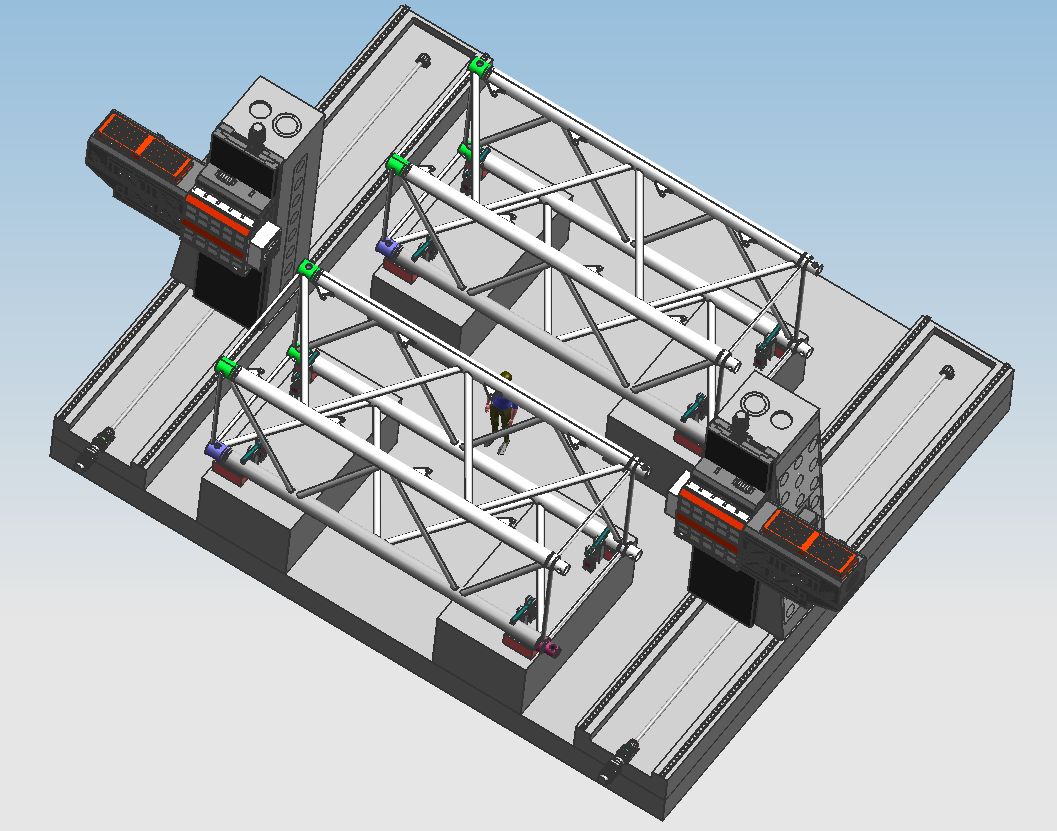
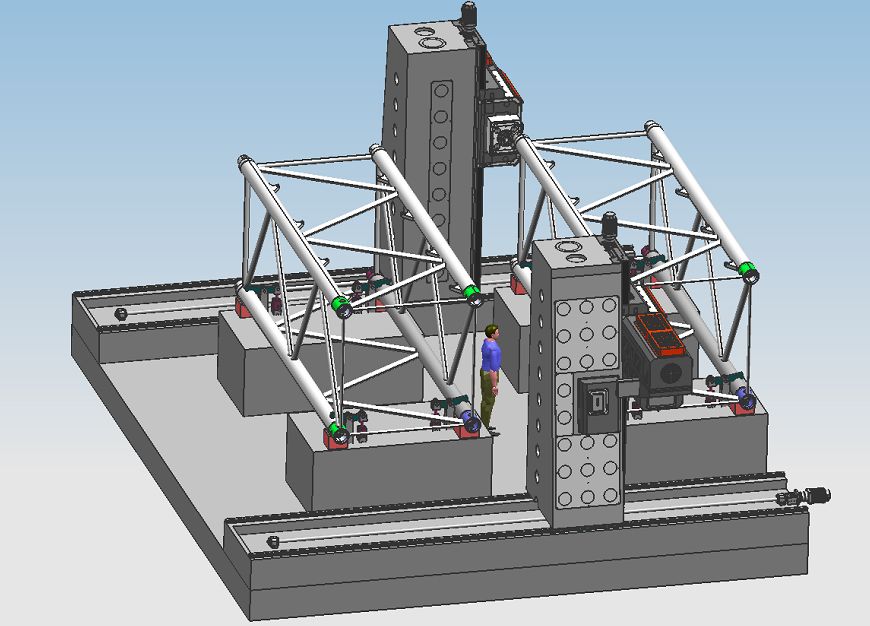
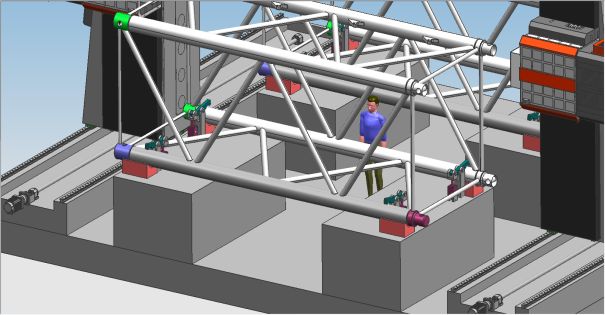
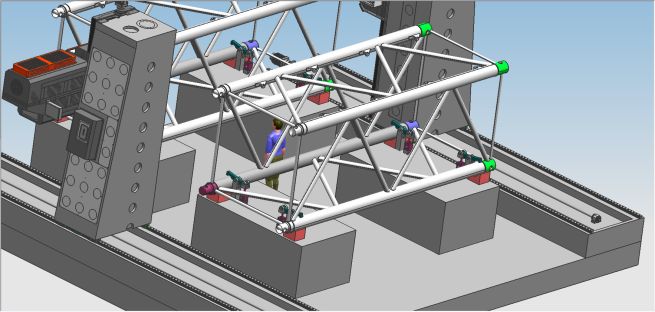
BOSM-6025 kaksiasemainen, pystysuora CNC-pylväs liikkuva kaksipylväinen, pää-päähän poraus- ja jyrsinkone on erityinen työstökone rakennuskoneiden symmetrisille työkappaleille.Työstökone on varustettu erityisellä liikkuvalla pylväällä ja kahdella vaakasuoran männillä, jotka voivat toteuttaa työkappaleen porauksen, jyrsinnän, porauksen ja muun työstön tehokkaalla iskualueella, työkappale voidaan käsitellä paikallaan kerralla (ei tarvetta toissijaiseen kiinnitykseen), nopea lastaus- ja purkunopeus, nopea paikannusnopeus, korkea käsittelytarkkuus ja korkea käsittelytehokkuus.
2. Laitteen rakenne:
2.1. Työstökoneen pääkomponentit
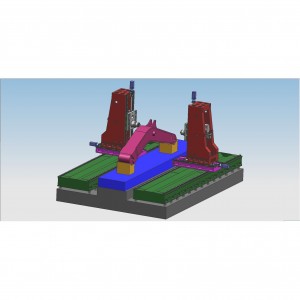
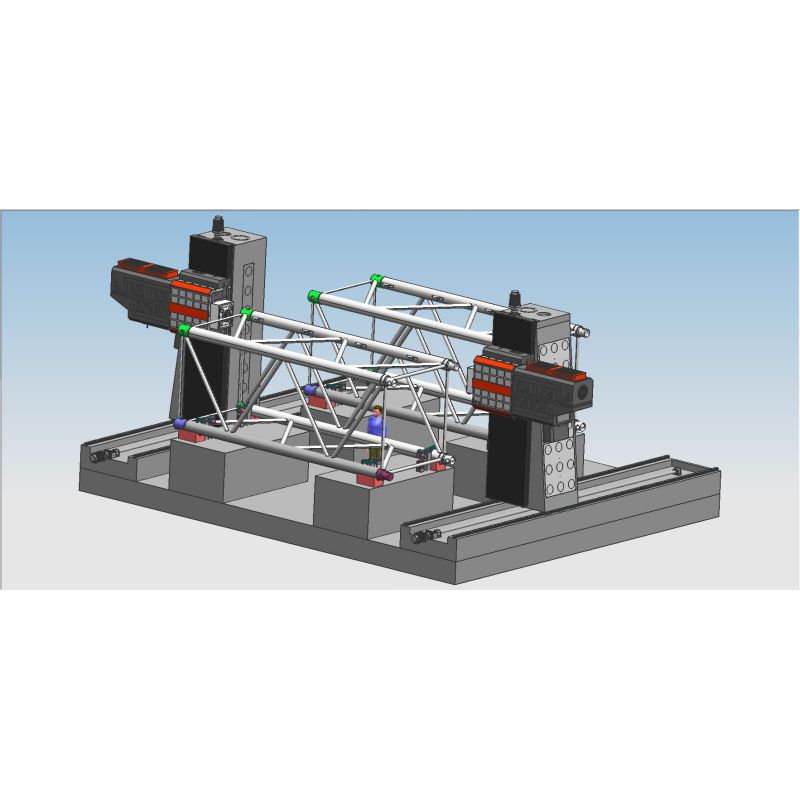
Sänky, työpöytä, vasen ja oikea pylväs, palkit, satulat, männät ja muut suuret osat ovat kaikki valmistettu hartsihiekkavalusta, korkealaatuisesta harmaaraudan 250 valusta, hehkutettu kuumahiekkakuopassa → tärinävanhennus → kuumauunihehkutus → tärinävanhentaminen → karkea työstö → tärinävanheneminen → kuumauunihehkutus → tärinävanheneminen → viimeistely, eliminoi kokonaan osien negatiivisen jännityksen ja pitää osien suorituskyvyn vakaana.Työstökoneessa on toimintoja, kuten jyrsintä, poraus, poraus, upotus, kierteitys jne., ja työkalun jäähdytysmenetelmä on ulkoinen jäähdytys, Työstökone sisältää 6 syöttöakselia, jotka voivat toteuttaa 4-akselisen kytkennän ja 6-akselisen yksiakselisen liitoksen. toiminta.Siinä on 2 tehopäätä.Työstökoneen ja tehopään aksiaalinen suunta on esitetty alla olevassa kuvassa.
2. 2Aksiaalivaihteiston syöttöosan päärakenne
2.2.1 X 1/X2 -akseli: Pylväs liikkuu edestakaisin pituussuunnassa kiinteän alustan ohjauskiskoa pitkin.
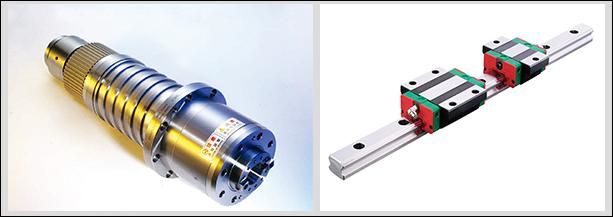
X-akselin voimansiirto: AC-servomoottoria ja erittäin tarkkaa planeettavähennystä käytetään ajamaan kaksi pylvästä palloruuvin voimansiirron läpi X-akselin lineaarisen liikkeen toteuttamiseksi.
Ohjainkiskomuoto: Aseta kaksi erittäin lujaa, tarkkaa lineaarista ohjauskiskoa.
2.2.2 Y1-akseli: Tehopää ja painin on asennettu pystysuoraan pilarin etupuolelle ja liikkuvat edestakaisin vasemmalle ja oikealle pilarin ohjauskiskoa pitkin.
Y1-akselin voimansiirto: AC-servomoottoria käytetään kuularuuvin ohjaamiseen satulan liikuttamiseen ja Y1-akselin lineaarisen liikkeen toteuttamiseen.
Ohjainkiskomuoto: 4 lineaarista ohjauskiskoa + kova kisko neliömäinen yhdistettynä.
2.2.3 Y2-akseli: Voimanpään toinen painin asennetaan pystysuoraan pilarin etupuolelle ja liikkuu edestakaisin vasemmalle ja oikealle kolonnin ohjauskiskoa pitkin.
Y2-akselin voimansiirto: AC-servomoottoria käytetään kuularuuvin ohjaamiseen satulan liikuttamiseen ja Y2-akselin lineaarisen liikkeen toteuttamiseen.
Ohjainkiskomuoto: 4 lineaarista ohjauskiskoa + kova kisko neliömäinen yhdistettynä.
2.2.4 Z1-akseli: Tehopään liukuva satula on asennettu pystysuoraan oikean pylvään etupuolelle, ja se liikkuu edestakaisin ylös ja alas pilarin ohjauskiskoa pitkin.
Z1-akselin voimansiirto: AC-servomoottoria ja erittäin tarkkaa planeettavähennystä käytetään painamaan painin liikkumaan palloruuvin läpi Z1-akselin lineaarisen liikkeen toteuttamiseksi.
Ohjainkiskomuoto: 2 lineaarista ohjauskiskoa.
2.2.5 Z2-akseli: Tehopään liukusatula on asennettu pystysuoraan oikean pylvään etupuolelle, ja se liikkuu edestakaisin ylös ja alas pilarin ohjauskiskoa pitkin.
Z1-akselin voimansiirto: AC-servomoottoria ja erittäin tarkkaa planeettavähennystä käytetään painamaan painin liikkumaan palloruuvin läpi Z2-akselin lineaarisen liikkeen toteuttamiseksi.
Ohjainkiskomuoto: 2 lineaarista ohjauskiskoa
Poraus- ja jyrsintäpää (mukaan lukien voimapäät 1 ja 2) on nelikulmainen yhdistelmäsylinteri, ja liikesuuntaa ohjaavat 4 lineaarista telan ohjauskiskoa.Taajuusmuuttaja käyttää AC-servomoottoria tarkkuuskuularuuviparin käyttämiseen.Kone on varustettu typen tasapainottimella., Vähennä ruuvin ja servomoottorin koneen kannan kantavuutta.Z-akselin moottorissa on automaattinen jarrutustoiminto.Sähkökatkon sattuessa automaattijarru pitää moottorin akselin tiukasti kiinni, jotta se ei pääse pyörimään.Työskenneltäessä, kun poranterä ei kosketa työkappaletta, se syöttää nopeasti;kun poranterä koskettaa työkappaletta, se vaihtaa automaattisesti työsyöttöön.Kun poranterä tunkeutuu työkappaleeseen, se vaihtaa automaattisesti pikakelaukseen;Kun poranterän pää lähtee työkappaleesta ja saavuttaa asetetun asennon, se siirtyy seuraavaan reiän asentoon automaattisen kierron toteuttamiseksi.Ja se voi toteuttaa sokean reiän porauksen, jyrsinnän, viisteen, lastun murtamisen, automaattisen lastunpoiston jne. toiminnot, mikä parantaa työn tuottavuutta.


500 mm:n iskunvaimennussekoitettu neliömäinen voimapää käyttää lineaarisia ohjaimia perinteisten terien sijaan parantaakseen huomattavasti ohjaustarkkuutta ja säilyttäen samalla neliömäisen jäykkyyden.
2.3. Työkappaleen hydraulinen kiristystoiminto
2.4Lastujen poisto ja jäähdytys
Työpöydän alle on asennettu molemmille puolille kierre- ja litteäketjuiset lastukuljettimet, ja lastut voidaan purkaa lopussa automaattisesti lastukuljettimelle kahden spiraali- ja ketjulevyvaiheen kautta sivistyneen tuotannon toteuttamiseksi.Lastukuljettimen jäähdytysnestesäiliössä on jäähdytyspumppu, jota voidaan käyttää työkalun ulkoiseen jäähdytykseen työkalun suorituskyvyn ja käyttöiän varmistamiseksi, ja jäähdytysneste voidaan kierrättää.
3. Täysin digitaalinen numeerinen ohjausjärjestelmä:
3.1.Lastunmurtotoiminnolla voidaan asettaa lastun katkeamisaika ja lastunmurtojakso ihmisen ja koneen välisellä rajapinnalla.
3.2.Työkalun nostotoiminnolla työkalun nostoetäisyys voidaan asettaa ihmisen ja koneen käyttöliittymässä.Kun työstö saavuttaa tämän etäisyyden, työkalu nostetaan nopeasti, sitten lastut heitetään ja sitten pikakelataan eteenpäin porauspintaan ja muunnetaan automaattisesti töihin.
3.3.Keskitetty ohjausyksikkö ja kämmenlaite käyttävät numeerista ohjausjärjestelmää, ja niissä on USB-liitäntä ja LCD-nestekidenäyttö.Ohjelmoinnin, tallennuksen, näytön ja viestinnän helpottamiseksi käyttöliittymässä on toimintoja, kuten ihmisen ja koneen välinen dialogi, virheen kompensointi ja automaattinen hälytys.
3.4.Laitteen tehtävänä on esikatsella ja tarkistaa reiän sijainti ennen käsittelyä, ja toiminta on erittäin kätevää.
4.Automaattinen voitelu
Työstökoneiden tarkat lineaariset ohjauskiskoparit, tarkkuuspalloruuviparit ja muut erittäin tarkat liikeparit on varustettu automaattisilla voitelujärjestelmillä.Automaattinen voitelupumppu tuottaa paineöljyä, ja kvantitatiivinen voitelulaitteen öljykammio tulee öljyyn.Kun öljykammio on täytetty öljyllä, kun järjestelmän paine nousee arvoon 1,4-1,75 Mpa, järjestelmän painekytkin sulkeutuu, pumppu pysähtyy ja tyhjennysventtiili purkautuu samanaikaisesti.Kun öljynpaine tiellä laskee alle 0,2 Mpa:n, kvantitatiivinen voitelulaite alkaa täyttää voitelukohtaa ja suorittaa yhden öljytäytön.Kvantitatiivisen öljysuuttimen tarkan öljynsyötön ja järjestelmän paineen havaitsemisen ansiosta öljynsyöttö on luotettavaa, mikä varmistaa, että jokaisen kinemaattisen parin pinnalla on öljykalvo, mikä vähentää kitkaa ja kulumista ja estää ylikuumenemisen aiheuttama sisäinen rakenne koneen tarkkuuden ja käyttöiän varmistamiseksi.Liukuvaan ohjauskiskopariin verrattuna tässä työstökoneessa käytetyllä vierivällä lineaarisella ohjauskiskoparilla on useita etuja:
① Suuri liikeherkkyys, vierivän ohjauskiskon kitkakerroin on pieni, vain 0,0025-0,01, ja käyttövoima pienenee huomattavasti, mikä vastaa vain yhtä tavallista konetta./10.② Ero dynaamisen ja staattisen kitkan välillä on hyvin pieni, ja seurantasuorituskyky on erinomainen, eli aikaväli ajosignaalin ja mekaanisen toiminnan välillä on erittäin lyhyt, mikä parantaa vastenopeutta ja herkkyyttä. numeerinen ohjausjärjestelmä.
③ Se soveltuu nopeaan lineaariseen liikkeeseen, ja sen hetkellinen nopeus on noin 10 kertaa suurempi kuin liukuvien ohjauskiskojen.④ Se voi toteuttaa aukoton liikkeen ja parantaa mekaanisen järjestelmän liikkeen jäykkyyttä.⑤Ammattimaisten valmistajien tuottama, sillä on korkea tarkkuus, hyvä monipuolisuus ja helppo huolto.
5.Akselin lasertarkastus:
Jokainen Bosmanin kone on kalibroitu Yhdistyneen kuningaskunnan RENISHAW-yhtiön laserinterferometrillä tarkastamaan ja kompensoimaan tarkasti ja kompensoimaan nousuvirheen, välyksen, paikannustarkkuuden, toistuvan paikannustarkkuuden jne. varmistaakseen laitteen dynaamisen, staattisen vakauden ja käsittelytarkkuuden. kone.Pallotangon tarkastus Jokaisessa koneessa käytetään brittiläisen RENISHAW-yrityksen kuulatankoa kalibroimaan todellisen ympyrän tarkkuuden ja koneen geometrisen tarkkuuden ja suorittamaan samalla ympyräleikkauskokeita varmistaakseen koneen 3D-työstötarkkuuden ja ympyrätarkkuuden.


6.Konetyökaluympäristö:
6.1.Laitteiden käyttöympäristövaatimukset
Ympäristön lämpötilan tasaisen tason ylläpitäminen on olennainen tekijä tarkkuustyöstössä.
(1) Käytettävän ympäristön lämpötilan vaatimus on -10 ℃ ~ 35 ℃, kun ympäristön lämpötila on 20 ℃, kosteuden tulee olla 40 ~ 75 %.
(2) Jotta työstökoneen staattinen tarkkuus pysyy määritellyllä alueella, optimaalinen ympäristön lämpötila vaatii 15 °C - 25 °C ja lämpötilaero
Ei saa ylittää ±2°C/24h.
6.1.2.Virtalähdejännite: 3 vaihetta, 380V, ±10 % jännitteenvaihtelualueella, virransyöttötaajuus: 50HZ.
6.1.3.Jos jännite käyttöalueella on epävakaa, työstökone tulee varustaa stabiloidulla virtalähteellä koneen normaalin toiminnan varmistamiseksi.
6.1.4.Työstökoneessa tulee olla luotettava maadoitus: maadoitusjohdin on kuparilankaa, johdon halkaisija ei saa olla alle 10 mm² ja maadoitusresistanssin tulee olla alle 4 Ω.
6.1.5.Laitteen normaalin toimintakyvyn varmistamiseksi, jos ilmalähteen paineilma ei voi täyttää ilmalähteen vaatimuksia, se tulee asentaa työstökoneeseen.
Lisää joukko ilmanpuhdistuslaitteita (kosteudenpoisto, rasvanpoisto, suodatus) ennen ilmaa.
6.1.6.Pidä laite poissa suorasta auringonpaisteesta, tärinästä ja lämmönlähteistä, suurtaajuusgeneraattoreista, sähköhitsauskoneista jne. välttääksesi työstökoneen tuotantohäiriöt tai työstökoneiden tarkkuuden heikkenemisen.
7.Ttekniset parametrit:
| Malli | 6025-6Z | |
| Työstettävän työkappaleen koko | Pituus × leveys × korkeus (mm) | 6000×2300×2300 |
| Portaalin maksimisyöttö | Leveys (mm) | 6800 |
| työpöydän koko | Pituus X Leveys (mm) | 3000*1000 =4 |
| Pylväsmatka | Sarakkeen siirto edestakaisin (mm) | 7000 |
| Kaksinkertainen nosto ylös ja alas | Männän liike ylös ja alas (mm) | 2500 |
| Karan keskipisteen etäisyys pöydän tasoon | 0-2500mm | |
|
Vaakasuuntainen mäntätyyppinen porauspää teho pää yksi kaksi
| Määrä (2) | 2 |
| Karan kartio | BT50 | |
| Poran halkaisija (mm) | Φ2-Φ60 | |
| Kierteityshalkaisija (mm) | M3-M30 | |
| Karan nopeus (r/min) | 30-5000 | |
| Servokaran moottorin teho (kw) | 37*2 | |
| Vasen ja oikea liikematka kahden karan pään välillä | 5800-6800mm | |
| Männän vasen ja oikea isku (mm) | 500 | |
| Kaksisuuntainen paikannustarkkuus | 300mm * 300mm | ±0,025 |
| Kaksisuuntainen toistuva paikannustarkkuus | 300mm * 300mm | ±0,02 |
| Työstökoneiden mitat | Pituus × leveys × korkeus (mm) | Piirustusten mukaan (jos suunnitteluprosessissa tapahtuu muutoksia, ilmoitamme sinulle) |
| Bruttopaino (t) | 72T | |